Lyapunov Control for Inverted Pendulum Swing Up
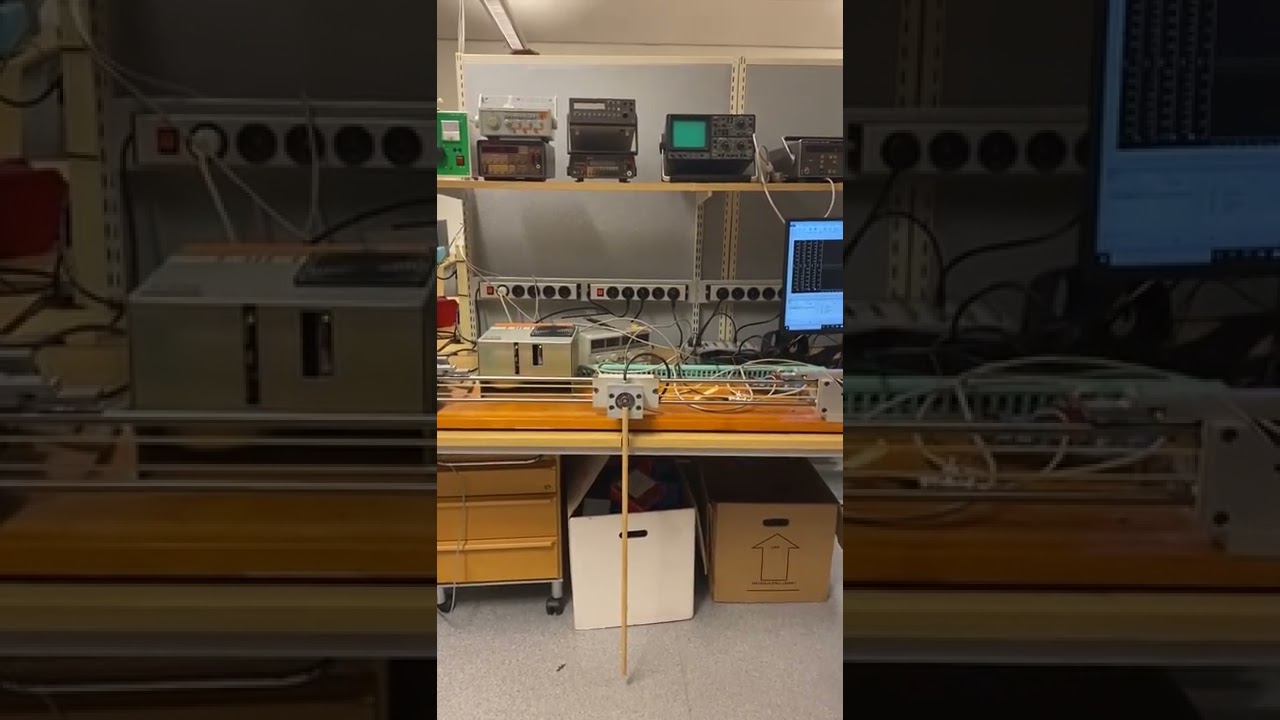
Demonstration of Lyapunov-based nonlinear control to swing up and balance an inverted pendulum using state feedback. 🔧

BTH Mechatronics
16.8K views • Apr 28, 2022
About this video
The video demonstrates Lyabunov-based nonlinear control to swing up a pendulum on a cart and balance it in an inverted position using state feedback control. The controller implementation is part of a project in the Continuation Course in Control (ET2612/ET2622 year 2021) at Blekinge Institute of Technology. The controller is implemented and the video is produced by two of our students, Fritjof Nilsson and Yanyun Peng, taking the control course.
Video Information
Views
16.8K
Likes
322
Duration
0:10
Published
Apr 28, 2022
User Reviews
4.6
(3) Related Trending Topics
LIVE TRENDSRelated trending topics. Click any trend to explore more videos.
No specific trending topics match this video yet.
Explore All Trends