RecurDyn Simulation: Stabilizing Inverted Pendulums with P and PID Control 🚀
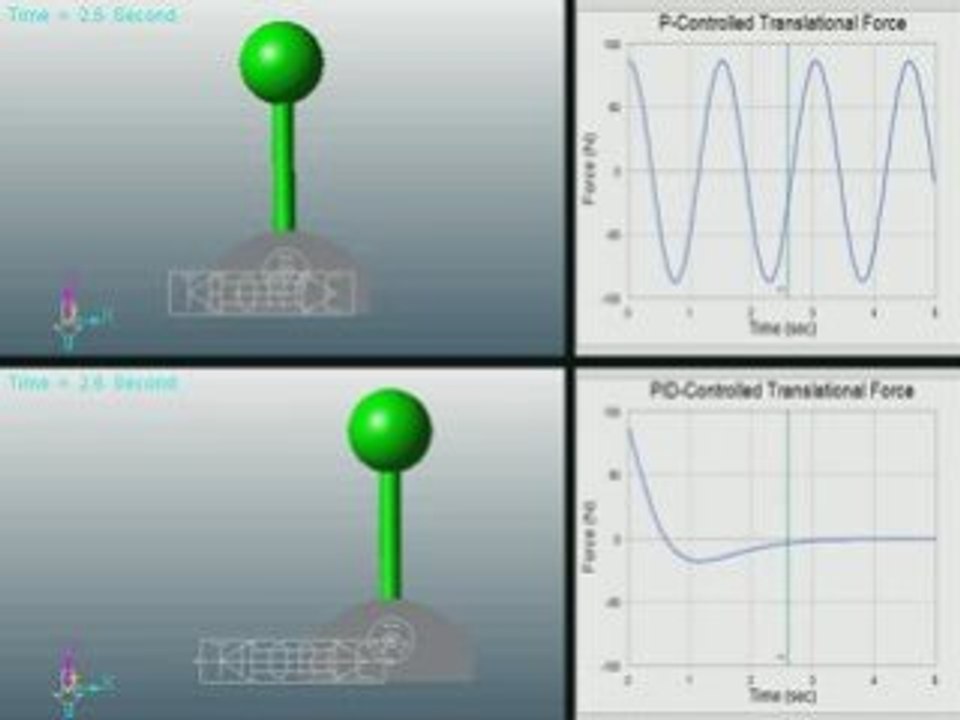
Explore how RecurDyn models two inverted pendulums, with one maintained upright using Proportional (P) and PID controllers under translational forces. Discover the dynamics and control strategies in this insightful simulation.
MotionPort LLC
3 views • Feb 6, 2009
About this video
RecurDyn simulation of two inverted pendulums. The first pendulum is kept upright with a translational force acting on the base, which uses Proportional (P) control. The second pendulum uses Proportional Integral Derivative (PID) control. The control systems were implemented in RecurDyn CoLink. RecurDyn can also interface directly with other control system software such as MATLAB Simulink. <br /><br />More information available at www.motionport.com.
Video Information
Views
3
Duration
0:13
Published
Feb 6, 2009
Related Trending Topics
LIVE TRENDSRelated trending topics. Click any trend to explore more videos.
No specific trending topics match this video yet.
Explore All Trends