Diverse Trajectory Forecasting with DPPs at ICLR 2020
Explores diverse trajectory prediction using Determinantal Point Processes for improved accuracy at ICLR 2020 🚶♂️

Ye Yuan
707 views • Jul 11, 2019
About this video
by Ye Yuan, Kris Kitani
International Conference on Learning Representations (ICLR), 2020
Paper: https://openreview.net/forum?id=ryxnY3NYPS
Abstract:
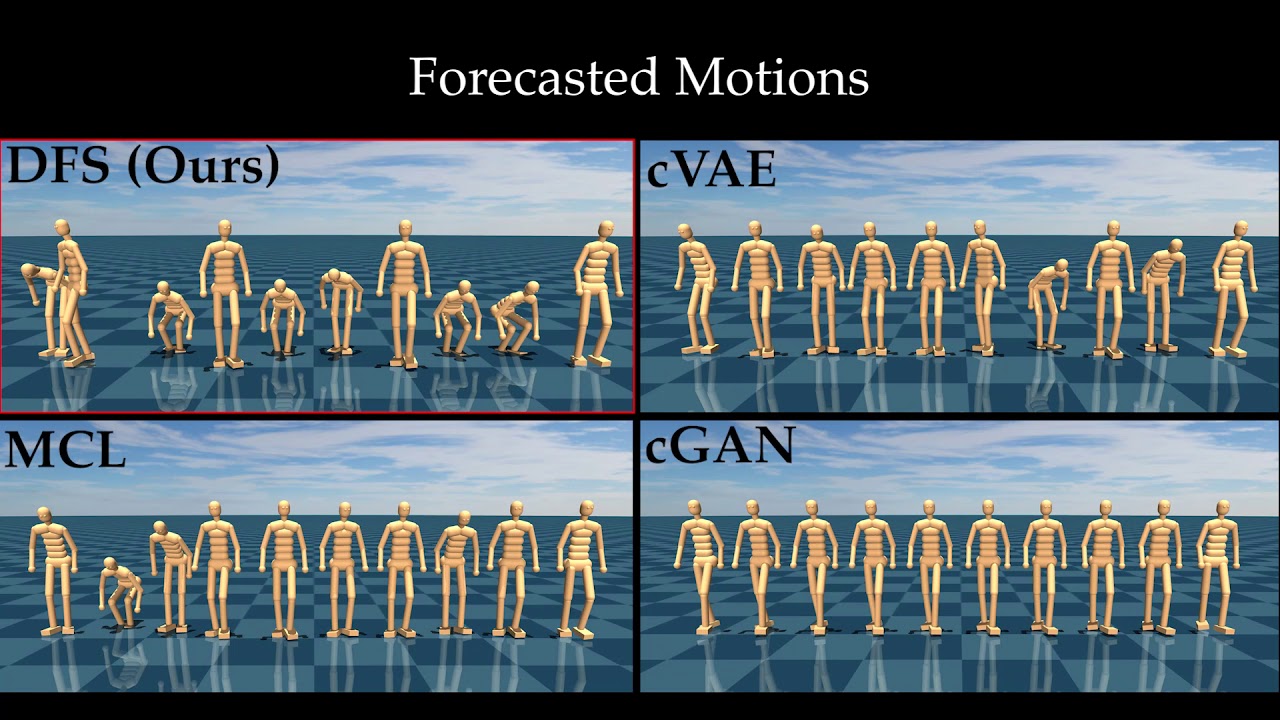
The ability to forecast a set of likely yet diverse possible future behaviors of an agent (e.g., future trajectories of a pedestrian) is essential for safety-critical perception systems (e.g., autonomous vehicles). In particular, a set of possible future behaviors generated by the system must be diverse to account for all possible outcomes in order to take necessary safety precautions. It is not sufficient to maintain a set of the most likely future outcomes because the set may only contain perturbations of a single outcome. While generative models such as variational autoencoders (VAEs) have been shown to be a powerful tool for learning a distribution over future trajectories, randomly drawn samples from the learned implicit likelihood model may not be diverse -- the likelihood model is derived from the training data distribution and the samples will concentrate around the major mode that has most data. In this work, we propose to learn a diversity sampling function (DSF) that generates a diverse and likely set of future trajectories. The DSF maps forecasting context features to a set of latent codes which can be decoded by a generative model (e.g., VAE) into a set of diverse trajectory samples. Concretely, the process of identifying the diverse set of samples is posed as a parameter estimation of the DSF. To learn the parameters of the DSF, the diversity of the trajectory samples is evaluated by a diversity loss based on a determinantal point process (DPP). Gradient descent is performed over the DSF parameters, which in turn move the latent codes of the sample set to find an optimal diverse and likely set of trajectories. Our method is a novel application of DPPs to optimize a set of items (trajectories) in continuous space. We demonstrate the diversity of the trajectories produced by our approach on both low-dimensional 2D trajectory data and high-dimensional human motion data.
International Conference on Learning Representations (ICLR), 2020
Paper: https://openreview.net/forum?id=ryxnY3NYPS
Abstract:
The ability to forecast a set of likely yet diverse possible future behaviors of an agent (e.g., future trajectories of a pedestrian) is essential for safety-critical perception systems (e.g., autonomous vehicles). In particular, a set of possible future behaviors generated by the system must be diverse to account for all possible outcomes in order to take necessary safety precautions. It is not sufficient to maintain a set of the most likely future outcomes because the set may only contain perturbations of a single outcome. While generative models such as variational autoencoders (VAEs) have been shown to be a powerful tool for learning a distribution over future trajectories, randomly drawn samples from the learned implicit likelihood model may not be diverse -- the likelihood model is derived from the training data distribution and the samples will concentrate around the major mode that has most data. In this work, we propose to learn a diversity sampling function (DSF) that generates a diverse and likely set of future trajectories. The DSF maps forecasting context features to a set of latent codes which can be decoded by a generative model (e.g., VAE) into a set of diverse trajectory samples. Concretely, the process of identifying the diverse set of samples is posed as a parameter estimation of the DSF. To learn the parameters of the DSF, the diversity of the trajectory samples is evaluated by a diversity loss based on a determinantal point process (DPP). Gradient descent is performed over the DSF parameters, which in turn move the latent codes of the sample set to find an optimal diverse and likely set of trajectories. Our method is a novel application of DPPs to optimize a set of items (trajectories) in continuous space. We demonstrate the diversity of the trajectories produced by our approach on both low-dimensional 2D trajectory data and high-dimensional human motion data.
Tags and Topics
Browse our collection to discover more content in these categories.
Video Information
Views
707
Likes
8
Duration
1:02
Published
Jul 11, 2019
Related Trending Topics
LIVE TRENDSRelated trending topics. Click any trend to explore more videos.
No specific trending topics match this video yet.
Explore All Trends